| Сегодня 2 декабря, вторник |
|
|
|
Каталоги Сервисы Блограйдеры Обратная связь Блогосфера
Какой рейтинг вас больше интересует?
|
Мобильные телекоммуникации №2 (март 2013)2013-03-26 13:42:12... -decoration: underline;">Мобильные телекоммуникации №2 (март 2013 ... + развернуть текст сохранённая копия
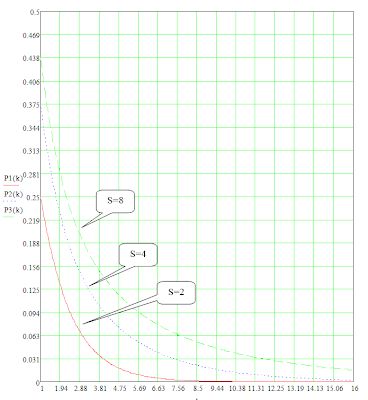
Название: Мобильные телекоммуникации №2 (март 2013) Тэги: мобильный, телекоммуникация Без заголовка2013-03-25 11:20:00+ развернуть текст сохранённая копия  Критерий качества организации системы Напомним, что в первой части мы рассмотрели основные особенности самоорганизующихся систем. Интуитивно, отсутствие организации отождествляется с хаосом. На основании этой интуитивной предпосылки, в кибернетике появилось специфическое понятие организации, которое применимо к широкому кругу объектов и систем и дает численную меру статистических связей между элементами системы - R. Это понятие основано на следующих рассуждениях. Пусть имеется некая система, которая состоит из отдельных частей или подсистем (не обязательно однородных). Каждая из этих подсистем, в процессе их существования или деятельности может принимать некоторое множество состояний, над которым задано конкретное распределение вероятностей. Если все подсистемы разобщены, то есть поведение одной подсистемы никак не влияет на поведение других, или, иными словами, все подсистемы независимы, то система будет являться предельно неорганизованной. Другой предельный (идеальный) случай – когда состояние одной подсистемы однозначно определяет состояние всех остальных. Если подсистемы разобщены, то энтропия множества состояний каждой подсистемы Zможет быть определена следующим образом:
где k= 1, 2, … N– возможные состояния подсистемы Zi, а Pik– вероятность того, что эта подсистема окажется в состоянии k. При этом если Pk=0.5, то
В предельно неорганизованной системе общая энтропия будет максимальна и равна сумме энтропий её подсистем. Так, для системы, состоящей из двух подсистем – Z*и Z**, будем иметь:
Если в системе имеются связи между её элементами (подсистемами), то есть эти элементы взаимно влияют друг на друга, то система организуется, и общая энтропия становится меньше суммы энтропий её элементов, и будет составлять:
где H(Z*|Z**) – условная энтропия, которая определяется выражением:
где P(Zj*|Zk**) – вероятность состояния Zj*, если имеет место состояние Zk**. Величина H(Z*|Z**) всегда удовлетворяет следующему условию:
при этом величина H(Z*|Z**)=0 только в том случае, если каждое состояние Zj* однозначно определяется состоянием Zk**. При таких условиях все P(Zj*|Zk**)=1, и H(Z*|Z**)=0 (в силу того, что log1=0). Данный случай соответствуют идеальной организации системы. Таким образом, в результате организации системы её энтропия H1будет ниже максимальной энтропии H0. Это уменьшение энтропии может служить численной мерой организованности системы – R:
при этом величина R=0 будет соответствовать предельно неорганизованной системе, а величина R=Н(Z*) – системе, которая организована идеально. Следует отметить, что величина Rопределяет уровень организации системы в процессе её функционирования (в динамике), а именно: величина Rможет быть больше нуля только тогда, когда система способна адаптироваться к изменениям состояний её элементов. Тэги: самоорганизация, связь, сеть, синергетика, телекоммуникация Без заголовка2013-03-18 09:26:00+ развернуть текст сохранённая копия  Реализация модели канала При построении алгоритма имитации работы всех каналов сети, сеть рассматривается как совокупность параллельно протекающих процессов. Каждый процесс есть некоторая последовательность событий, приводящих к изменению состояний синхронных автоматов, описывающих поведение элементов сети, причём, под событием понимается любое изменение сигналов на входах этих автоматов. В общем случае, эти процессы не должны считаться независимыми, а а должны взаимодействовать между собой. Принципы взаимодействия процессов могут быть проиллюстрированы следующим примером. Представим себе фрагмент сети, включающий в себя Nабонентов, работающий на одной и той же частоте. Такой фрагмент может рассматриваться как система массового обслуживания с одним прибором, который обслуживает некий поток требований от Nстанций. Если требование, придя в систему, застаёт прибор свободным, то оно занимает прибор и обслуживается в нём в течение некоторого промежутка времени, после чего покидает систему. В противном случае, требование поступает в очередь к прибору, где будет дожидаться завершения обслуживания всех ранее поступивших в систему требований. Причём эта очередь «виртуальна» - требования могут быть сосредоточены как в одном узле, так и распределены по разным узлам. В такой системе, на начальных фазах обслуживания, «передатчик» каждого узла может находиться в одном из следующих состояний:
Переход «передатчика» из одного состояния в другое, осуществляется под воздействием комбинаций входных сигналов. Эти сигналы могут поступать, как извне - от модуля, имитирующего поведение «высшего» уровня, так и от других автоматов - автоматов того же уровня. Например, (см. рисунок 1), переход автомата из состояния «ожидание кадра» в состояние «ожидание освобождения канала» осуществляется при появлении сигнала «требование передачи», а переход в следующее состояние – «запуск таймера отсрочки» - зависит от состояний аналогичных автоматов, претендующих на тот же канал. Если какой либо другой аналогичный автомат находится в состоянии «захват канала», то рассматриваемый автомат будет получать сигнал «канал занят».  Рисунок 1 Из рассматриваемого примера видно, что в моделируемой сети могут сосуществовать параллельные «типовые» процессы, каждый из которых может находиться в своём уникальном состоянии. Но, при их имитации на одной ЭВМ, эти события необходимо рассматривать последовательно. Поэтому, совокупность параллельно протекающих процессов должна быть представлена в виде упорядоченной последовательности моментов наступления событий во времени. При таких условиях, сканируя эту последовательность, и определяя, в каждый наступивший момент реакции автоматов на изменения входных сигналов, можно сымитировать любую ситуацию в системе. При этом, любая сложившаяся ситуация может быть представлена в виде вектора Z=║Zn║, каждый элемент которого - Zn, соответствует конкретному автомату - Mn, а значение этого элемента – состоянию данного автомата. Например, если некий автомат M1занял канал, (состояние St4), а автомат M2ожидает его освобождения (состояние St1), то фрагмент вектора Zбудет содержать информацию, которая показана на рисунке 2:
Рисунок 2 При наступлении особого состояния, (изменении входных сигналов), этот вектор модифицируется с помощью следующего алгоритма: - поочерёдно рассматриваются состояния всех автоматов; - при рассмотрении каждого состояния определяется соответствующая ему выходная комбинация - µ; - на основании полученных µ отыскиваются входные комбинации для всех автоматов - λ; - найденные входные комбинации фиксируются в памяти ЭВМ; - с помощью таблиц переходов определяются новые состояния автоматов. В принципе, такие операции («ревизии» состояний системы) можно производить на каждом такте имитации – любая ситуация может считаться особым состоянием. Но такое решение нецелесообразно, поскольку потребует больших затрат машинного времени. Более целесообразно считать особыми состояниями только те ситуации, которые определяют моменты выхода автоматов из пассивных состояний - состояний ожидания. В основном, моменты выхода из пассивных состояний определяются таймерами, поскольку именно они определяют моменты системного времени, соответствующие узловым точкам в имитируемых параллельных процессах. Состояния этих таймеров – числа Tk, которые соответствуют моментам активизации тех или иных автоматов. Если таймер запущен, то это число должно каким-то образом уменьшаться, и в тот момент, когда оно станет равным нулю, заданный тайм-аут должен считаться завершённым. Как в реальной системе, так и в имитационной модели, могут одновременно работать kтаймеров, причём каждый из них может завершить отсчёт в конкретный момент времени – Tk. Имея такие числа можно определить момент наступления ближайшего особого состояния системы, которое может быть определено с помощью проверки условия (1):
Далее, после активизации соответствующих процессов, значения всех запущенных таймеров уменьшается на величину TR, позволяя тем самым определить момент наступления следующего особого состояния. Следует отметить, что особые события могут порождаться не только таймерами, но и всеми другими автоматами. Причём эти автоматы могут находиться в пассивных состояниях, время выхода из которых – Ta, определить нельзя. В таких случаях возможно следующее решение – если входной сигнал не меняет состояния автомата, то считать Ta= ∞. В противном же случае считать, что Ta= 0. Для определения значения Taможно воспользоваться таблицей переходов, действуя следующим образом:
Например, в представленной на рисунке 3 таблице переходов, выделенные элементы соответствуют активным состояниям автомата, которые следует считать особыми событиями, а все остальные элементы – пассивным состояниям автомата.
Рисунок 3 Рассмотренный принцип имитации поведения сложных систем с дискретными событиями может являться основой для построения других аналогичных моделей. При этом программные модули, обеспечивающие имитацию квазипараллельных процессов в системе, могут оставаться неизменными – если потребуется исследовать поведение групповых каналов, основанных на использовании иных протоколов, то программное обеспечение может оставаться неизменным, и только модели поведения «передатчиков» и «приёмников» могут быть представлены в виде таблиц иного содержания. В то же время, данный принцип может являться основой для обеспечения наглядной интерпретации поведения системы. Но это возможно лишь только в том случае, если основными мотивами расчленения модели на операторы и блоки (конечные автоматы) будут являться не только «вычислительные удобства» для программистов, но и категории, понятия и образы, которые понятны и привычны для большинства специалистов, работающих в данной области. Тэги: алгоритм, имитационный, моделирование, связь, сеть, телекоммуникация Без заголовка2013-03-11 11:04:00
+ развернуть текст сохранённая копия  Имитационная модель канала коллективного доступа В предыдущей статье мы оценивали вероятность успешного захвата канала в конкурентном окне. Имитация процессов передачи и приёма кадра 1.1. В упрощенном виде, процесс передачи кадра по радиолучу (Xi, Xj) может быть представлен, как поведение композиции конечных автоматов, которая изображена на рисунке 1: 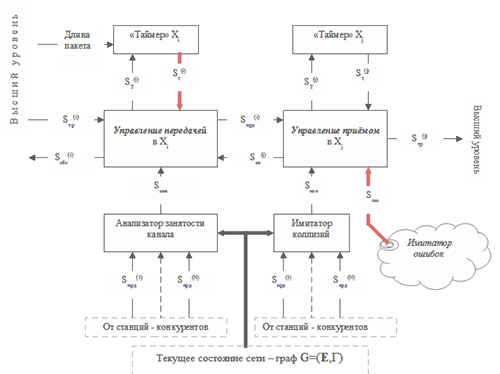 Рисунок 1 1.2. Изображённый на рисунке 1 «Таймер» Xiпредназначен для определения моментов времени, соответствующих: 1) времени отсрочки начала передачи очередного пакета (кадра); 2) времени завершения передачи; 3) времени ожидания «квитанции». При этом, поведение этого «таймера» может быть, как детерминировано (при определении момента времени, соответствующего завершению передачи пакета), так и псевдослучайным (при вычислении времени отсрочки начала передачи). 1.3. «Таймер» Xj– определяет момент начала и завершения передачи квитанции, причём поведение этого таймера всегда детерминировано. Следует отметить, что, как «Таймер» Xi, так и «Таймер» Xi, ведут отсчёт интервалов времени в особых условных единицах – «тиках». Предположительно, один «тик» имитирует интервал времени, соответствующий длительности одного «слота». 1.4. Автомат, который имитирует процесс управления передачей кадра по радиолучу (Xi, Xj) фактически выполняет функции «диспетчера», взаимодействующим со своим «окружением» с помощью следующих сигналов: 1) сигналов Sтр(i) и Sобс(i), обеспечивающих взаимодействие с протоколом «высшего» уровня, который «поставляет» кадры для передачи, причём: - сигнал Sтр(i) соответствует поступлению очередного требования на передачу кадра; - сигнал Sобс(i), который соответствует запросу очередного требования на обслуживание, когда предыдущая заявка на обслуживание уже выполнена. 2) сигналов ST(i) и S(i), первый из которых определяет тип интервала времени, а именно: - времени отсрочки передачи пакета; - времени завершения передачи пакета; - времени ожидания квитанции, а второй – S(i) – завершению отсчёта заданного интервала. 3) сигналов Sпрд(i) и Sкв(j), обеспечивающих имитацию взаимодействия с «приёмной стороной» (автоматом «Управление приёмом в Xj»). При этом сигнал Sпрд(i)= 1 оповещает все «станции» Xjо том, что передатчик Xiнаходится в состоянии передачи. 4) и, наконец, сигнала Sзан, запрещающего выход в эфир, формируемого «анализатором занятости канала». Данный анализатор представляет собой тривиальный автомат, реализующий булеву функцию (1):
где - Aki (k=1, 2, . . . , N) – элементы матрицы смежности A=║Aij║, описывающей граф G=(E,Г), соответствующий текущему состоянию сети; - Sпрд(k)(k=1, 2, . . . , N) – значения сигналов, соответствующих состояниям конкурирующих станций: если конкурент Xkведёт передачу, то Sпрд(k) =1. - N– число узлов в сети. Следует отметить, что функция (1) может быть использована только в том случае, если все узлы сети работают на одной и той же частоте. Если же это условие не выполняется, то функция (1) должна быть дополнена действием (2):
1.5. Хотя функции (1) и (2) и тривиальны, но, по-видимому, требуют пояснений. Для этого рассмотрим следующий пример. Пусть условия радиослышимости описываются графом, который изображён на рисунке 2:  Рисунок 2 Такому графу будет соответствовать матрица A=║Aij║, которая представлена на рисунке 3:
Рисунок 3 Теперь предположим, что на частоту wiпретендуют передатчик Xiи его конкуренты – станции Xbи Xd. Сравнивая пары значений AkiSпрд(k), получим картину, представленную на рисунке 4:
Рисунок 4 Это означает, что станция Xiспособна уступить канал станции Xb, но никогда не обнаружит каких-либо признаков активности со стороны станции Xd. Но, это - особенность IEEE802.11 …. 1.6. Поведение автомата «Управление передачей» может быть описано диаграммой состояний, представленной на рисунке 5:  Рисунок 5 Данный автомат может находиться в одном из восьми состояний:
Переходы данного автомата из одного состояния в другое осуществляются под воздействием символов входного алфавита - i, то есть под воздействием конкретных комбинаций входных сигналов. Эти комбинации приведены в таблице 1: Таблица 1
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||