Какой рейтинг вас больше интересует?
|
Главная / Главные темы / Тэг «имитационный»

Без заголовка 2013-03-18 09:26:00
... , так и в имитационной модели, могут одновременно ...
+ развернуть текст сохранённая копия
Реализация модели канала
При построении алгоритма имитации работы всех каналов сети, сеть рассматривается как совокупность параллельно протекающих процессов. Каждый процесс есть некоторая последовательность событий, приводящих к изменению состояний синхронных автоматов, описывающих поведение элементов сети, причём, под событием понимается любое изменение сигналов на входах этих автоматов. В общем случае, эти процессы не должны считаться независимыми, а а должны взаимодействовать между собой. Принципы взаимодействия процессов могут быть проиллюстрированы следующим примером. Представим себе фрагмент сети, включающий в себя Nабонентов, работающий на одной и той же частоте. Такой фрагмент может рассматриваться как система массового обслуживания с одним прибором, который обслуживает некий поток требований от Nстанций. Если требование, придя в систему, застаёт прибор свободным, то оно занимает прибор и обслуживается в нём в течение некоторого промежутка времени, после чего покидает систему. В противном случае, требование поступает в очередь к прибору, где будет дожидаться завершения обслуживания всех ранее поступивших в систему требований. Причём эта очередь «виртуальна» - требования могут быть сосредоточены как в одном узле, так и распределены по разным узлам. В такой системе, на начальных фазах обслуживания, «передатчик» каждого узла может находиться в одном из следующих состояний: ожидание очередного кадра; ожидание освобождения канала; запуск таймера, определяющего время начала передачи кадра (основной принцип канального протокола – «слушать», прежде чем «вещать»); ожидание завершения данного интервала; захват канала и передача кадра.
Переход «передатчика» из одного состояния в другое, осуществляется под воздействием комбинаций входных сигналов. Эти сигналы могут поступать, как извне - от модуля, имитирующего поведение «высшего» уровня, так и от других автоматов - автоматов того же уровня. Например, (см. рисунок 1), переход автомата из состояния «ожидание кадра» в состояние «ожидание освобождения канала» осуществляется при появлении сигнала «требование передачи», а переход в следующее состояние – «запуск таймера отсрочки» - зависит от состояний аналогичных автоматов, претендующих на тот же канал. Если какой либо другой аналогичный автомат находится в состоянии «захват канала», то рассматриваемый автомат будет получать сигнал «канал занят».
Рисунок 1
Из рассматриваемого примера видно, что в моделируемой сети могут сосуществовать параллельные «типовые» процессы, каждый из которых может находиться в своём уникальном состоянии. Но, при их имитации на одной ЭВМ, эти события необходимо рассматривать последовательно. Поэтому, совокупность параллельно протекающих процессов должна быть представлена в виде упорядоченной последовательности моментов наступления событий во времени. При таких условиях, сканируя эту последовательность, и определяя, в каждый наступивший момент реакции автоматов на изменения входных сигналов, можно сымитировать любую ситуацию в системе. При этом, любая сложившаяся ситуация может быть представлена в виде вектора Z=║Zn║, каждый элемент которого - Zn, соответствует конкретному автомату - Mn, а значение этого элемента – состоянию данного автомата. Например, если некий автомат M1занял канал, (состояние St4), а автомат M2ожидает его освобождения (состояние St1), то фрагмент вектора Zбудет содержать информацию, которая показана на рисунке 2:
Конечный автомат | Текущее состояние | M1 | St4 | M2 | St1 | . | . |
|
|
Рисунок 2 При наступлении особого состояния, (изменении входных сигналов), этот вектор модифицируется с помощью следующего алгоритма: - поочерёдно рассматриваются состояния всех автоматов; - при рассмотрении каждого состояния определяется соответствующая ему выходная комбинация - µ; - на основании полученных µ отыскиваются входные комбинации для всех автоматов - λ; - найденные входные комбинации фиксируются в памяти ЭВМ; - с помощью таблиц переходов определяются новые состояния автоматов. В принципе, такие операции («ревизии» состояний системы) можно производить на каждом такте имитации – любая ситуация может считаться особым состоянием. Но такое решение нецелесообразно, поскольку потребует больших затрат машинного времени. Более целесообразно считать особыми состояниями только те ситуации, которые определяют моменты выхода автоматов из пассивных состояний - состояний ожидания. В основном, моменты выхода из пассивных состояний определяются таймерами, поскольку именно они определяют моменты системного времени, соответствующие узловым точкам в имитируемых параллельных процессах. Состояния этих таймеров – числа Tk, которые соответствуют моментам активизации тех или иных автоматов. Если таймер запущен, то это число должно каким-то образом уменьшаться, и в тот момент, когда оно станет равным нулю, заданный тайм-аут должен считаться завершённым. Как в реальной системе, так и в имитационной модели, могут одновременно работать kтаймеров, причём каждый из них может завершить отсчёт в конкретный момент времени – Tk. Имея такие числа можно определить момент наступления ближайшего особого состояния системы, которое может быть определено с помощью проверки условия (1):
Далее, после активизации соответствующих процессов, значения всех запущенных таймеров уменьшается на величину TR, позволяя тем самым определить момент наступления следующего особого состояния. Следует отметить, что особые события могут порождаться не только таймерами, но и всеми другими автоматами. Причём эти автоматы могут находиться в пассивных состояниях, время выхода из которых – Ta, определить нельзя. В таких случаях возможно следующее решение – если входной сигнал не меняет состояния автомата, то считать Ta= ∞. В противном же случае считать, что Ta= 0. Для определения значения Taможно воспользоваться таблицей переходов, действуя следующим образом: выделить строку такой таблицы, которая соответствует текущему состоянию автомата; убедиться в том, что текущая комбинация входных сигналов соответствует «петле», то есть возвращает автомат в то же состояние, в котором он уже находиться; если это условие выполняется – то Ta : = ∞, в противном случае - Ta : = 0.
Например, в представленной на рисунке 3 таблице переходов, выделенные элементы соответствуют активным состояниям автомата, которые следует считать особыми событиями, а все остальные элементы – пассивным состояниям автомата.
Состояние | Символы входного алфавита | λ0 | λ1 | λ2 | λ3 | λ4 | λ5 | λ* | St0 | St0 | St1 | St4 | St4 | - | - | - | St1 | St2 | St1 | St4 | St4 | - | - | - | St2 | - | - | - | - | - | - | St3 | St3 | - | - | - | - | St3 | - | - | St4 | St0 | - | St4 | St4 | - | - | - |
Рисунок 3 Рассмотренный принцип имитации поведения сложных систем с дискретными событиями может являться основой для построения других аналогичных моделей. При этом программные модули, обеспечивающие имитацию квазипараллельных процессов в системе, могут оставаться неизменными – если потребуется исследовать поведение групповых каналов, основанных на использовании иных протоколов, то программное обеспечение может оставаться неизменным, и только модели поведения «передатчиков» и «приёмников» могут быть представлены в виде таблиц иного содержания. В то же время, данный принцип может являться основой для обеспечения наглядной интерпретации поведения системы. Но это возможно лишь только в том случае, если основными мотивами расчленения модели на операторы и блоки (конечные автоматы) будут являться не только «вычислительные удобства» для программистов, но и категории, понятия и образы, которые понятны и привычны для большинства специалистов, работающих в данной области.
Тэги: алгоритм, имитационный, моделирование, связь, сеть, телекоммуникация
Без заголовка 2013-03-11 11:04:00
... , sans-serif;"> Имитационная модель канала коллективного ...
+ развернуть текст сохранённая копия
Имитационная модель канала коллективного доступа
В предыдущей статье мы оценивали вероятность успешного захвата канала в конкурентном окне.
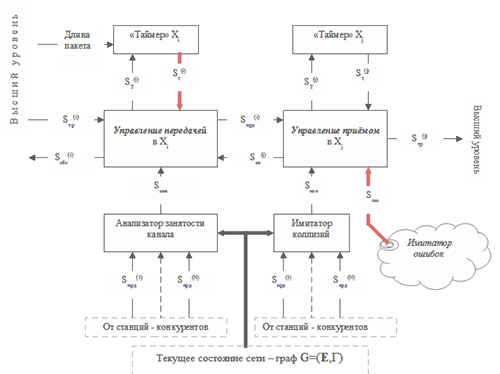
Имитация процессов передачи и приёма кадра 1.1. В упрощенном виде, процесс передачи кадра по радиолучу (Xi, Xj) может быть представлен, как поведение композиции конечных автоматов, которая изображена на рисунке 1: Рисунок 1 1.2. Изображённый на рисунке 1 «Таймер» Xiпредназначен для определения моментов времени, соответствующих: 1) времени отсрочки начала передачи очередного пакета (кадра); 2) времени завершения передачи; 3) времени ожидания «квитанции». При этом, поведение этого «таймера» может быть, как детерминировано (при определении момента времени, соответствующего завершению передачи пакета), так и псевдослучайным (при вычислении времени отсрочки начала передачи). 1.3. «Таймер» Xj– определяет момент начала и завершения передачи квитанции, причём поведение этого таймера всегда детерминировано. Следует отметить, что, как «Таймер» Xi, так и «Таймер» Xi, ведут отсчёт интервалов времени в особых условных единицах – «тиках». Предположительно, один «тик» имитирует интервал времени, соответствующий длительности одного «слота». 1.4. Автомат, который имитирует процесс управления передачей кадра по радиолучу (Xi, Xj) фактически выполняет функции «диспетчера», взаимодействующим со своим «окружением» с помощью следующих сигналов: 1) сигналов Sтр(i) и Sобс(i), обеспечивающих взаимодействие с протоколом «высшего» уровня, который «поставляет» кадры для передачи, причём: - сигнал Sтр(i) соответствует поступлению очередного требования на передачу кадра; - сигнал Sобс(i), который соответствует запросу очередного требования на обслуживание, когда предыдущая заявка на обслуживание уже выполнена. 2) сигналов ST(i) и S(i), первый из которых определяет тип интервала времени, а именно: - времени отсрочки передачи пакета; - времени завершения передачи пакета; - времени ожидания квитанции, а второй – S(i) – завершению отсчёта заданного интервала. 3) сигналов Sпрд(i) и Sкв(j), обеспечивающих имитацию взаимодействия с «приёмной стороной» (автоматом «Управление приёмом в Xj»). При этом сигнал Sпрд(i)= 1 оповещает все «станции» Xjо том, что передатчик Xiнаходится в состоянии передачи. 4) и, наконец, сигнала Sзан, запрещающего выход в эфир, формируемого «анализатором занятости канала». Данный анализатор представляет собой тривиальный автомат, реализующий булеву функцию (1): Sзан = A1i Sпрд(1) v A2i Sпрд(2) v . . . v ANi Sпрд(N) | (1) |
где - Aki (k=1, 2, . . . , N) – элементы матрицы смежности A=║Aij║, описывающей граф G=(E,Г), соответствующий текущему состоянию сети; - Sпрд(k)(k=1, 2, . . . , N) – значения сигналов, соответствующих состояниям конкурирующих станций: если конкурент Xkведёт передачу, то Sпрд(k) =1. - N– число узлов в сети. Следует отметить, что функция (1) может быть использована только в том случае, если все узлы сети работают на одной и той же частоте. Если же это условие не выполняется, то функция (1) должна быть дополнена действием (2): Sпрд(k) : = 0, если Xiwi, Xjwi, но Xkwi | (2) |
1.5. Хотя функции (1) и (2) и тривиальны, но, по-видимому, требуют пояснений. Для этого рассмотрим следующий пример. Пусть условия радиослышимости описываются графом, который изображён на рисунке 2:
Рисунок 2 Такому графу будет соответствовать матрица A=║Aij║, которая представлена на рисунке 3:
| Xi | Xj | Xb | Xc | Xd | Xi | 0 | 1 | 1 | 1 | 1 | Xj | 1 | 0 | 0 | 1 | 1 | Xb | 1 | 0 | 0 | 1 | 0 | Xc | 1 | 1 | 1 | 0 | 1 | Xd | 0 | 1 | 0 | 1 | 0 |
Рисунок 3 Теперь предположим, что на частоту wiпретендуют передатчик Xiи его конкуренты – станции Xbи Xd. Сравнивая пары значений AkiSпрд(k), получим картину, представленную на рисунке 4:
| Aki |
| Sпрд(k) |
| Xi | 0 | & | 1 | = 0 | Xj | 1 | & | 0 | = 0 | Xb | 1 | & | 1 | = 1 | Xc | 1 | & | 0 | = 0 | Xd | 0 | & | 1 | = 0 |
Рисунок 4 Это означает, что станция Xiспособна уступить канал станции Xb, но никогда не обнаружит каких-либо признаков активности со стороны станции Xd. Но, это - особенность IEEE802.11 …. 1.6. Поведение автомата «Управление передачей» может быть описано диаграммой состояний, представленной на рисунке 5:
Рисунок 5 Данный автомат может находиться в одном из восьми состояний: St0 – исходное состояние - ожидание заявки на передачу кадра; St1 – ожидание освобождения канала; St2 – запуск таймера, обеспечивающего отсчёт времени отсрочки начала передачи пакета, а также момента времени завершения его передачи; St3 – ожидание собственного «слота»; St4 – передача пакета в эфир; St5 – запуск таймера ожидания квитанции; St6 – ожидание квитанции; St7 – оповещение о факте неудачной попытке передачи кадра.
Переходы данного автомата из одного состояния в другое осуществляются под воздействием символов входного алфавита - i, то есть под воздействием конкретных комбинаций входных сигналов. Эти комбинации приведены в таблице 1: Таблица 1 Символ входного алфавита | Значения входных сигналов | Sтр(i) | S(i) | Sкв(i) | Sзан(i) | λ0 | 0 | x | x | x |
Тэги: 802.11, wi-fi, имитационный, маршрутизация, моделирование, связь, сеть, телекоммуникация
Без заголовка 2013-03-04 10:07:00
... мы рассмотрим имитационную модель канала коллективного ...
+ развернуть текст сохранённая копия
Вероятность успешного захвата канала в конкурентном окнеНапомним, ранее мы попытались оценить возможные потери при возникновении коллизий в канале коллективного доступа. В IEEE802.11 временной интервал, выделенный на захват канала какой-либо станцией, ограничен и разделён на более короткие интервалы – слоты, причём число таких слотов ограничено. При этом порядковый номер слота определяет время отсрочки процесса передачи пакета, привязанное к некоему событию, например, освобождению канала. Каждая станция выбирает «свой» слот случайным образом и выходит в эфир только в том случае, если выполняются следующие условия: канал свободен; время отсрочки исчерпано.
Кроме того, будем считать, что захват одного и того же слота двумя и более станциями неизбежно приведёт к коллизиям. Общее число ситуаций, которые могут возникнуть при случайном «розыгрыше» слотов, будет равняться числу размещений с повторением из kпо S, и определяться выражением (1):
где
Очевидно, что далеко не любая из этих ситуаций может привести к успешной передаче пакета. Например (см. рисунок 1), станция «А» может захватить и успешно использовать 1-й слот только тогда, когда её «конкуренты» будут претендовать только на захват последующих слотов.
Рисунок 1
Число таких ситуаций зависит от числа слотов - Sи числа «конкурентов» - k, и определяется выражением (2):
а вероятность захвата 1-го слота – выражением (3):
Станция «А» может успешно использовать и 2-й слот, но только в том случае, если ни одна из конкурирующих станций не будет претендовать ни на 1-й, ни на 2-й слоты. Соответствующий пример приведён на рисунке 2:
Рисунок 2
Вероятность подобной ситуации будет определяться выражением (4):
Аналогичным образом может быть определена вероятность успешного использования третьего слота – см. выражение (5):
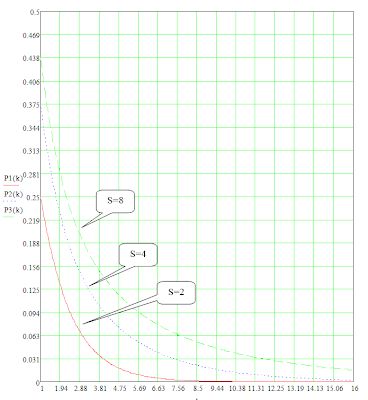
В общем же случае, суммарная вероятность «победы» в конкурентной борьбе, нацеленной на захват канала, будет равняться величине Pзхв, которая может быть определена по формуле (6): S-1 |
| Pзхв = P1 + P2 + ... + PS-1 = (S-i) k / Sk+1 | (6) | i=1 |
|
Следует отметить, что формула (6) справедлива только при k>0. Очевидно, что, при k>0, последний слот не может быть захвачен и успешно использован двумя и более абонентами. Но если k=0, то последний, S-тый слот может быть также успешно использован, следовательно, величина Pзхвбудет равна единице. 3.2.5. Графики функции (6) при различных значениях величины Sпредставлены на рисунке 3:
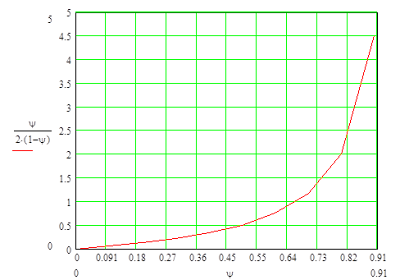
Рисунок 3 Рассматривая приведённые графики можно прийти к следующему выводу: даже при небольшом числе конкурирующих станций, вероятность успешной попытки захвата канала очень мала. Причём увеличение числа слотов повышает эту вероятность, но незначительно, а при большом числе конкурентов стремится к нулю. Пренебрегать этим обстоятельством нельзя, и очевидно, что имитация механизмов противодействия коллизиям (как на канальном, так и прикладном уровнях) должна рассматриваться как неотъемлемая часть разрабатываемой модели. Но при этом необходимо ответить на следующий вопрос, - какой способ имитации этих процессов наиболее целесообразен? Рассмотренные в данном разделе методики обладают рядом положительных качеств. Задачи решены «в общем виде» и не привязаны к конкретным числовым значениям параметров потока и системы обслуживания, что позволяет делать полезные общие заключения. Но, к сожалению, эти методики позволяют находить общие решения для задач, сводящихся к элементарным ситуациям – то есть в случаях, когда поток заявок невелик и на один и тот же канал будут претендовать одна-две станции. В принципе, такое допущение возможно и может считаться достаточно корректным. Например, при имитации движения пользовательского трафика можно считать, что нагрузка на любой канал не должна превышать 80% его производительности, поскольку в противном случае очереди в узлах будут стремительно расти. Для того, чтобы убедиться в этом, достаточно рассмотреть график, который приведён на рисунке 4:
Рисунок 4
Этот график показывает зависимость времени пребывания пакета в очереди от нагрузки на канал - Ψ=λ/μ, где λ – интенсивность потока заявок, а μ – производительность канала. (при построении графика предполагалось, что поток заявок – Пуассоновский, а время обслуживания – постоянное). Время ожидания показано в условных единицах: одна условная единица – время обслуживания одного пакета. Тогда, рассматривая этот график можно прийти к следующему заключению: при Ψ=0.8 средняя величина очереди на канал равна двум. И можно допустить, что ситуации, при которых на один и тот же канал будут претендовать более 2-х станций, не представляют интереса, поскольку строить сети с «бесконечными» очередями не имеет смысла.
Далее мы рассмотрим имитационную модель канала коллективного доступа.
Тэги: 802.11, wi-fi, имитационный, маршрутизация, моделирование, связь, сеть, телекоммуникация
Без заголовка 2013-02-25 12:26:00
... исходных данных для имитационного моделирования.
+ развернуть текст сохранённая копия
Оценка возможных потерь при возникновении коллизий
Осветив в предыдущей части вопрос оценки зон действия радиосигналов мы переходим к следующему разделу.
Вероятность доставки пакета при абсолютно случайном доступе Допустим, что устройства, обеспечивающие передачу информации в канал связи, не оснащены какими-либо механизмами, позволяющими избежать коллизий (одновременной работы двух и более передатчиков на одной и той же частоте). Это означает, что любая станция может передавать данные в любое время, и нет никакой гарантии, что эти данные будут успешно доставлены получателю. Но с другой стороны такая схема доступа, в силу своей простоты, весьма привлекательна и допускается IEEE802.11. Более того, есть основания предполагать, что она будет устойчиво работать в сетях с малой нагрузкой. Остаётся ответить на вопрос, – с какой? Особенностью функционирования такой системы является то, что, процесс успешной передачи пакета по любому направлению (Xi, Xj), может быть нарушен при выходе в эфир любой станции, кроме Xi. Вероятность такого события может быть определена с помощью соотношения (3.1): P(Tij) = 1 - exp (- λ∑ (ij) Tij) | (1) | где - λ∑(ij) – плотность суммарного потока пакетов, поступающих от «конкурентов» станции Xi; - Tij- время передачи пакета по направлению (Xi, Xj);
Следует отметить, что формула (1) справедлива только в том случае, если «фоновый» поток λ∑(ij) является простейшим, то есть подчиняется закону распределения Пуассона. Однако, ориентация на данный закон может быть обоснована его следующими свойствами: к простейшему потоку системам массового обслуживания иногда приспособиться труднее, и при имитации их работы мы, как бы, ставим систему в более тяжёлые условия; если при исследовании поведения системы мы рассчитываем на этот «тяжёлый случай», то обслуживание реальной системой других случайных потоков с той же плотностью поступления требований будет надёжнее; при сложении нескольких случайных потоков образуется суммарный поток, который по своим характеристикам приближается к простейшему.
Имея значения величин λ∑(ij)и Tijможно вычислить вероятность успешной передачи пакета по любому радиолучу. Для того чтобы получить эту вероятность следует действовать следующим образом. Допустим, что в одну и ту же зону радиослышимости входят три станции, чему соответствует граф, изображённый на рисунке 1:
Рисунок 1 Каждой дуге такого графа (Xi, Xj) может быть поставлен в соответствие поток - λij(будем считать, что такие потоки известны). Как уже отмечалось, успешное завершение передачи пакета возможно только в том случае, если в интервале Tijни одна из «конкурирующих» станций не будет пытаться занять эфир. Вероятность такого стечения обстоятельств может быть определена с помощью соотношения (2): Pijусп = [1 – P(Tij)] = exp (- λ∑(ij) Tij) | (2) |
При этом, величина λ∑(ij)будет зависеть от «окружения» передающей и приёмной станций. Для рассматриваемого примера будем иметь: λ∑(12) = λ∑(13) = λ21 + λ23 + λ31 + λ32 – «фоновый» поток для (X1,X2) и (X1,X3); λ∑(21) = λ∑(23) = λ12 + λ13 + λ31 + λ32 – «фоновый» поток для (X2,X1) и (X2,X3); λ∑(31) = λ∑(32) = λ12 + λ13 + λ31 + λ32 – «фоновый» поток для (X3,X1) и (X3,X2).
Пользуясь соотношением (2), можно найти ориентировочное значение величины Pijусп при любом распределении потоков. Для этого достаточно следующих исходных данных: 1) матрицы Λ(w)=║λij(w)║, задающей потоки между всеми парами узлов рассматриваемой зоны «w»; 2) времени передачи пакета - величины Tij. Если считать, что все пакеты имеют одинаковую длину и скорости их передачи одинаковы, то величина Pijуспможет быть представлена в виде функции e-α, где α=λ∑Tij. График такой функции представлен на рисунке 2.
Рисунок 2
Данный график показывает, что даже относительно небольшой «фоновый» поток, может снизить вероятность успешной передачи пакета до неприемлемой величины. С другой стороны, даже при предельной нагрузке, 37% пакетов могут быть успешно переданы с первой попытки. Несомненно, что это обстоятельство должно учитываться при подготовке и анализе исходных данных для имитационного моделирования. Потоки могут быть заданы таким образом, что при моделировании сети могут быть получены «блестящие» результаты. Например (см. рисунок 3), если основная нагрузка на канал ляжет направление (X1, X2):
Рисунок 3
а поток α∑(1)будет отвечать условию (3) α∑(1) = α21 + α23 + α31 + α32 ≤ 0.02 | (3) |
то система может оказаться весьма эффективной. К аналогичным результатам приведёт другой вариант распределения нагрузки, при котором 98% нагрузки будут соответствовать направлениям, инцидентным единственному узлу – X1(см. рисунок 4):
Рисунок 4
Но если все величины αij будут равны между собой, то канал окажется в наиболее тяжёлых условиях. Причём, с ростом числа абонентов канала, требования к ограничению потока будут всё более и более жёсткими. Поэтому такой режим доступа вряд ли найдёт широкое применение. Тем не менее, такая схема коллизий понадобится при рассмотрении ситуаций, когда две или несколько станций будут находиться в разных зонах радиослышимости, но будут попадать в зону охвата третьей станции («проблема скрытых станций» ).
Далее мы попробуем оценить вероятность успешного захвата радиоканал в конкурентном окне.
Тэги: 802.11, wi-fi, имитационный, маршрутизация, моделирование, связь, сеть, телекоммуникация
Без заголовка 2013-02-21 18:18:00
+ развернуть текст сохранённая копия
Оценка зон действия радиосигналов
В предыдущей части мы рассмотрели формальное представление сети при моделировании. Теперь же более подробно остановимся на оценке зон действия радиосигналов.
Для любого типа беспроводной связи передаваемый сигнал рассеивается по мере его распространения в пространстве. Следовательно, мощность сигнала на принимающей антенне будет уменьшаться по мере её удаления от передающей антенны. Причина этого – распространение сигнала по всё большей площади. Очевидно, что это обстоятельство должно учитываться при составлении графа G=(E,Г), описывающего условия радиослышимости. Для этого, можно воспользоваться известными моделями распространения радиосигналов. Таких моделей разработано достаточное количество и многие из них можно легко найти в интернете. Согласно одной из моделей, дальность связи – величина D, определяется формулой (1): D = 10[(FSL / 20) – (33 / 20)lgF] | (1) |
где - F– центральная частота передачи (МГц); - FSL– потери в свободном пространстве, которые определяется с помощью выражения (2): FSL = Pt,дБВт + Gt,дБи+ Gr,дБи – Pmin,дБВт – Lt,дБ – Lr,дБ – SOM | (2) |
где - Pt,дБВт – мощность передатчика; - Gt,дБи- коэффициент усиления передающей антенны; - Gr,дБи- коэффициент усиления приёмной антенны; – Pmin,дБВт - чувствительность приёмника на используемой скорости передачи; – Lt,дБ - потери сигнала в коаксиальном кабеле и разъёмах передающего тракта; – Lr,дБ - потери сигнала в коаксиальном кабеле и разъёмах приёмного тракта. Все перечисленные величины берутся из паспортных данных используемых приёмных и передающих устройств. Параметр SOM(SystemOperatingMargin) - учитывает возможные факторы, отрицательно на дальность связи, такие как: - температурный дрейф чувствительности приёмника и выходной мощности передатчика; - всевозможные атмосферные явления: туман, снег, дождь; - рассогласование антенн приёмника и передатчика с антенно-фидерным трактом. Параметр SOMобычно берётся равным 10 дБ– при инженерных расчётах считается, что такой запас в энергетике связи вполне достаточен. Теперь представим себе, что пользователю известны расстояния между всеми парами станций – Dijи характеристики этих станций. В этом случае, пользователь будет в состоянии оценить возможность радиосвязи между любой парой абонентов – если действительное расстояние Dijбольше соответствующего расчетного значения (см. выражение (1)), то следует считать, что связь между станциями Xiи Xjотсутствует и вероятность существования соответствующего радиолуча – Pij, приравнивается нулю. Как уже отмечалось, радиоволна в процессе её распространения в пространстве занимает объём в виде эллипсоида вращения с максимальным радиусом в середине пролёта, который называется зоной Френеля. Естественные преграды - земля, холмы, деревья и искусственные препятствия - здания, холмы и т.д., которые попадают в это пространство, ослабляют сигнал. Обычно блокирование 20% зоны Френеля вносит незначительное затухание в канал. При блокировании свыше 20% затухание сигнала будет уже заметным, поэтому будем считать, что следует избегать соответствующих мест дислокации станций. Тогда, при подготовке исходных данных для моделирования, можно считать целесообразным следующее предположение: если величина R отвечает неравенству (3) R > 17,3 [Di Dj / F (Di + Dj)]-2 | (3) |
где Di – расстояние от антенны станции Xi до самой высшей точки предполагаемого препятствия (см. рисунок 1); Di – аналогичное расстояние от антенны станции Xj; F – средняя частота передачи;
то следует считать, что Pij=0. В противном случае - Pij=1. Рисунок 1 В следующей части мы рассмотрим возможные потери пакетов при возникновении коллизий в канале коллективного доступа.
Тэги: имитационный, маршрутизация, моделирование, связь, сеть, телекоммуникация
Главная / Главные темы / Тэг «имитационный»
|
Взлеты Топ 5
Падения Топ 5
|
Загрузка... 
|